


PLC在旋转定位机构中的应用
1、硬件配置
 1.1 MOTEC AWD-FB-XZ 转动装置 如图:
1.1 MOTEC AWD-FB-XZ 转动装置 如图:

1.2 MOTEC步进系统SM3913 (电机)+STD3-220-70(驱动)1套
1.3 MOTEC精密行星减速机APE80-20 1台
1.4位传感器2只
1.5松下PLC可编程控制器AFPX-C30T +AFPX-COM1 – 1套;
1.6触摸屏057-LST – 1块;
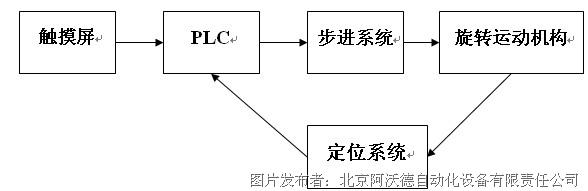
2、系统控制原理:
2.1通过触摸屏进行运行参数设定(起点,终点,旋转角度,速度,步距,停止时间),工艺参数表下传、设备数据状态显示、故障报警自动前台显示、PLC内部变量监视等。
2.2设定的运行参数(距离,时间,加速度)计算出速度,通过脉冲输出给步进驱动器控制步进电机的运转。步进电机再带动旋转运动机构运动定位。
2.3旋转机构上装有2个限位开关,一个用于原点定位,一个是固定角度硬件定位。
3、本套系统的优点:
3.1集成度高,系统配线简单,稳定性高,降低了系统的故障概率。
3.2用了触摸屏作人机界面,使操作更简便、透明。
3.3这套系统可适应各种伺服,步进系统;脉冲控制,抗干扰能力强;高精度限位系统保障其安全性。
4、使用情况:
4.1设置好运动的技术参数,进行参数表下传,使操作简便。
4.2任何一个操作,由于各部分间的联锁,如操作不允许时,触摸屏会拒绝操作,并不向下输出指令所以不会产生误操作。
4.3现场设备发生故障时,也能在触摸屏和PLC上显示,提示操作者故障之所在,也给维修带来极大的方便。
4.4主要动作功能内容:
系统复位:使转台返回初始位置0°;
旋转指定角度:使转台相对现有位置旋转指定的角度,最小步距1°,支持正向与反向;
到达指定角度:以初识位置为0°,使转台旋转到指定角度,最小步距1°;
位置保持:使转台在该位置上保持一定时间,保持时间通过用户定义;
连续动作:指定起始角度、终止角度、步距、停留时间,使转台从起始角度开始按步距运行,每到达一个位置停留指定时间,直至达到终止角度。
4.5设备照片





 投诉建议
投诉建议
提交

MOTEC α系列 交流伺服系统

翠欧(TRIO) P823-MC403三轴运动控制器
松下伺服- 电机、驱动器

日本日机(NIKKI) 三自由度纳米平台

阿沃德荣获慧聪网工业机器人行业“配套件十大品牌”称号